
Lecture 11-1: The KKT Conditions#
Download the original slides: CMSE382-Lec11_1.pdf
Warning
This is an AI-generated transcript of the lecture slides and may contain errors or inaccuracies. Please refer to the original course materials for authoritative content.
This Lecture#
Topics:
Feasible descent direction
Inequality and equality constrained problems
Example: Equality constrained
Example KKT not satisfied
Announcements:
None
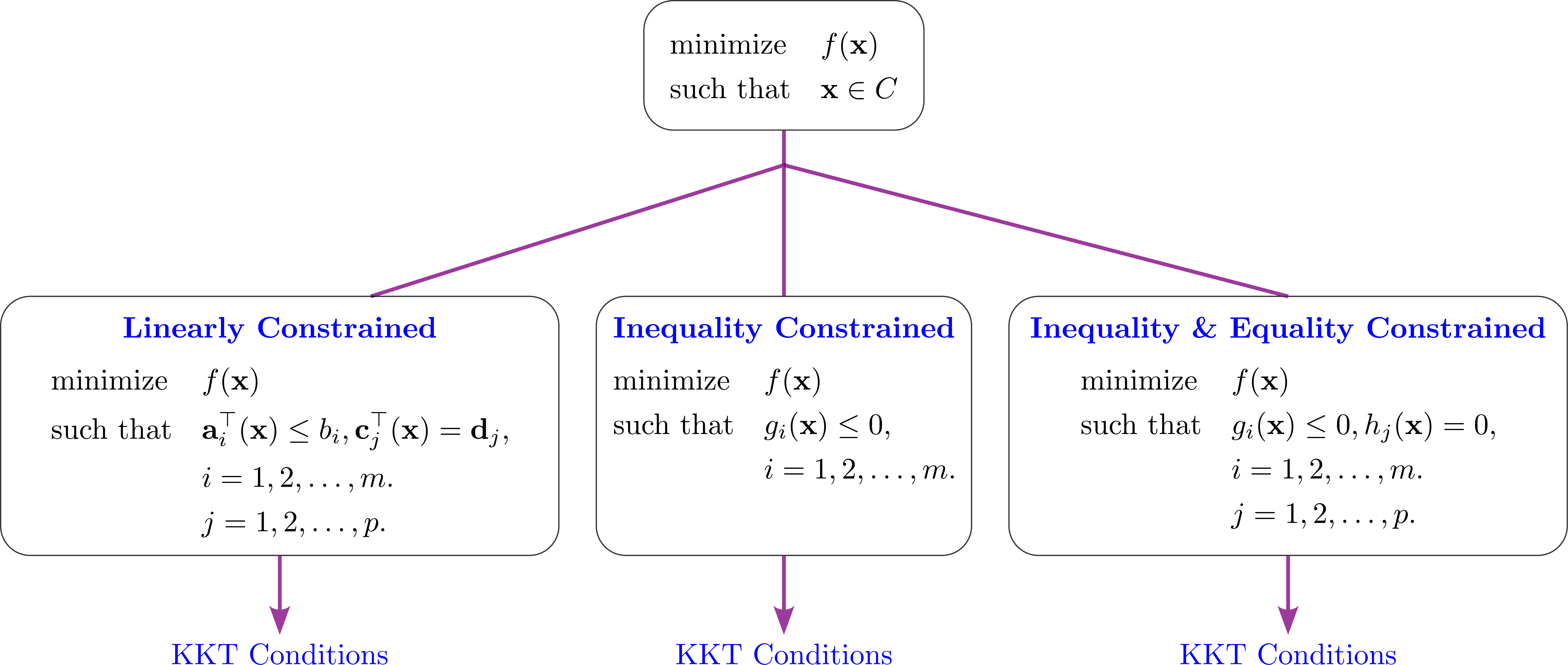
Inequality and equality constrained problems#
Outlook#
Idea: Feasible descent direction#
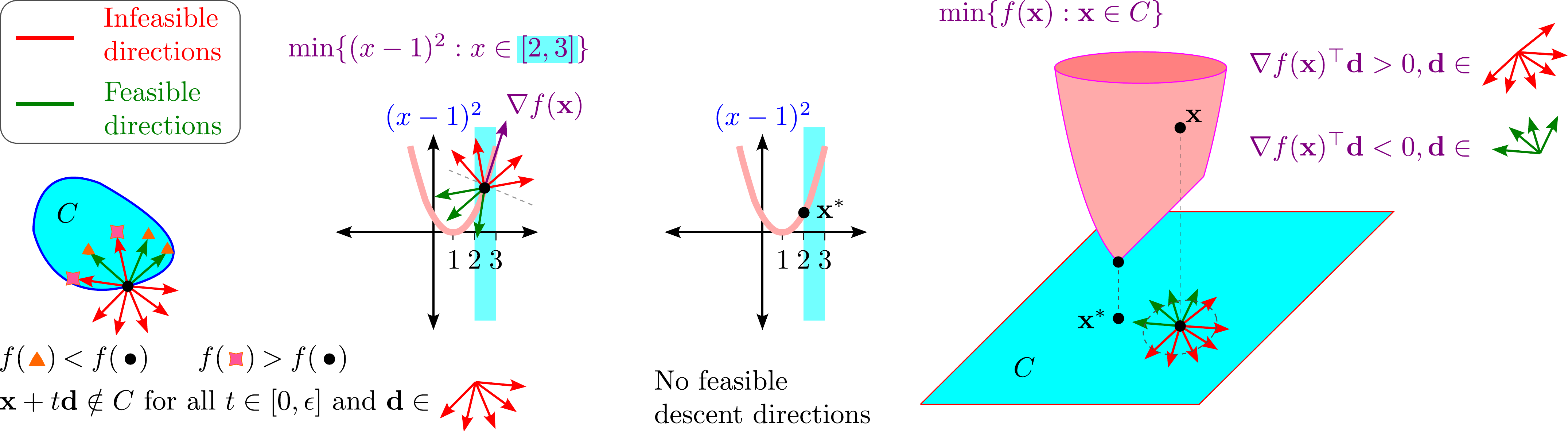
Feasible descent direction#
Theorem (Feasible descent direction)
Consider the optimization problem
where \(f\) is continuously differentiable function over the set \(C \subseteq \mathbb{R}^n\).
Then a vector \(\mathbf{d} \neq 0\) is called a feasible descent direction at \(\mathbf{x} \in C\) if
\(\nabla f(\mathbf{x})^{\top} \mathbf{d} < 0\), and
there exists \(\e > 0\) such that \(\mathbf{x} + t \mathbf{d} \in C\) for all \(t \in [0,\e]\).
Lemma
If \(\mathbf{x}^*\) is a local optimal solution, then there are no feasible descent directions at \(\mathbf{x}^*\).
Idea: there is no direction you can move that will both decrease the function’s value and stay within the problem’s constraints.
Recall: Active constraints#
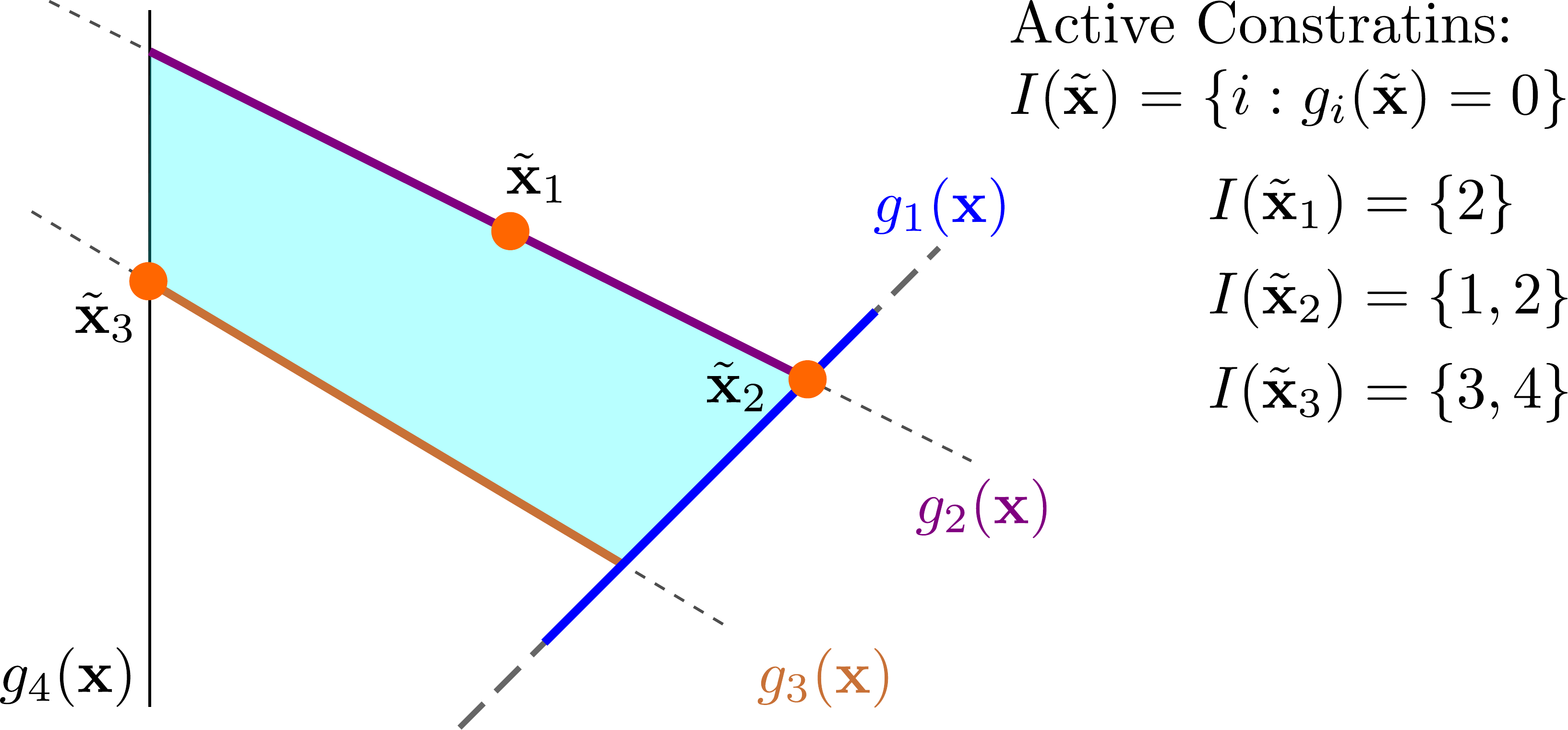
Definition (Recall: Active constraints)
Given a set of inequalities
where \(g_i:\mathbb{R}^n \to \mathbb{R}\) are functions, and a vector \(\tilde{\mathbf{x}} \in \mathbb{R}^n\), the active constraints at \(\tilde{\mathbf{x}}\) are the constraints satisfied as equalities at \(\tilde{\mathbf{x}}\). The set of active constraints is denoted by
Regular Points#
Consider the minimization problem
where \(f,g_1,\ldots,g_m,h_1,h_2,\ldots,h_p\) are continuously differentiable functions over \(\mathbb{R}^n\).
Definition
A feasible point \(\mathbf{x}^*\) is called regular if the gradients of the active constraints among the inequality constraints and of the equality constraints
are linearly independent.
Feasible points that are not regular are called irregular points.
Linear Independence#
Definition
A collection of vectors
is linearly independent if the only solution to the equation
is \(\alpha_1 = \alpha_2 = \ldots = \alpha_k = 0\).
Some methods for checking:
Check using the definition directly.
If there is one vector, this is linearly independent if it is nonzero.
If there are two vectors, they are linearly independent if they are not scalar multiples of each other.
Put the \(k\) vectors as columns in a matrix \(A\).
If \(k\leq n\) and \(\mathrm{rank}(A) = k\), then the vectors are linearly independent.
If \(k=n\), then the vectors are linearly independent if \(\det(A) \neq 0\).
If \(k>n\), then the vectors are linearly dependent.
KKT Points#
Consider the minimization problem
where \(f,g_1,\ldots,g_m,h_1,h_2,\ldots,h_p\) are continuously differentiable functions over \(\mathbb{R}^n\).
Definition
A feasible point \(\mathbf{x}^*\) is called a KKT point if there exist \(\lambda_1,\lambda_2,\ldots,\lambda_m \geq 0\) and \(\mu_1,\mu_2,\ldots,\mu_p \in \mathbb{R}\) such that
KKT conditions for Inequality and equality constrained problems#
Theorem (Inequality and equality constrained problems)
Let \(\mathbf{x}^*\) be a local minimum of the problem
where \(f,g_1,\ldots,g_m,h_1,h_2,\ldots,h_p\) are continuously differentiable functions over \(\mathbb{R}^n\). Suppose that \(\mathbf{x}^*\) is regular, then \(\mathbf{x}^*\) is a KKT point.
A necessary condition for local optimality of a regular point is that it is a KKT point.
Regularity is not required in the linearly constrained case.