08 In-Class Assignment: The Kinematics of Robotics
Contents
###StartInClass###
08 In-Class Assignment: The Kinematics of Robotics#

Image from: https://pixabay.com/images/search/toy robot/
Today, we will calculate the forward kinematics of some 3D robots. This means we would like to come up with a set of transformations such that we can know the \(x,~y,~z\) coordinates of the end effector with respect to the world coordinate system which is at the base of the robot.
1. Review Pre-class Assignment#
Like most days, your instructor will review and answer questions from your pre-class assignment. This is your opportunity to ask any lingering questions.
Combining transformations via multiplication
In 2D, let us recall the following rotation matrices We can rotate these points around the origin by using the following simple set of equations:
This can be rewritten in the following matrix form:
Let $\( P_1 = \left[ \begin{matrix} \cos(\pi/4) & -\sin(\pi/4) \\ \sin(\pi/4) & \cos(\pi/4) \end{matrix} \right] , \qquad \qquad P_2 = \left[ \begin{matrix} \cos(\pi/3) & -\sin(\pi/3) \\ \sin(\pi/3) & \cos(\pi/3) \end{matrix} \right] \)$
then given a point \(X = (x_0,y_0)\), the multiplication
means we first rotate the point \(X\) around the origin by \(\pi/4\) (using \(P_1\)), then continue to rotate around the origin by \(\pi/3\) (using \(P_2\)). Note the order of the operations, which will be important later when combining with other transformations.
To accommodate for the translation in 2D, one needs to modify the pair \((x,y)\) into \((x,y,1)\). The reason for that is, for example, the translation shifting upward by 1 unit $\( (x,y) \mapsto (x,y+1) \)\( in this new coordinates after addting a third component can be written as multiplication by a matrix \)\( \left[ \begin{matrix} 1 & 0 & 0\\ 0 & 1 & 1\\ 0 & 0 & 1\\ \end{matrix} \right]\left[ \begin{matrix} x\\ y\\ 1 \end{matrix} \right] = \left[ \begin{matrix} x\\ y+1\\ 1 \end{matrix} \right] \)$
Question: Given a point \(P = (1,2)\) in the 2D plan. Using the idea above (making it to 3D by adding a thrid component as \(1\)) to find the point resulted after:
First: rotate around the origin by \(\pi/2\)
Second: shift downward by 5 unit
Represent your matrix using sympy as \(M\) (it should be a \(3\times 1\) matrix as we added a third component).
Hint: How can you make the rotation matrix from \(2\times 2\) into \(3\times 3\)?
# put your answer here
# What is the matrix J1 representing the first rotation as 3 * 3 matrix?
# What is the matrix J12representing the first rotation as 3 * 3 matrix?
2. Pick and Place#
Consider the robot depicted in the following image.

This style of robot is often called a “pick-and-place” robot. It has two motors that rotate around the \(z\)-axis to move the end effector in the \(x-y\)-plane; one “linear actuator” which moves up-and-down in the \(z\)-direction; and then finally a third rotating “wrist” joint that turns the “hand” of the robot. Let’s model our robot using the following system diagram:
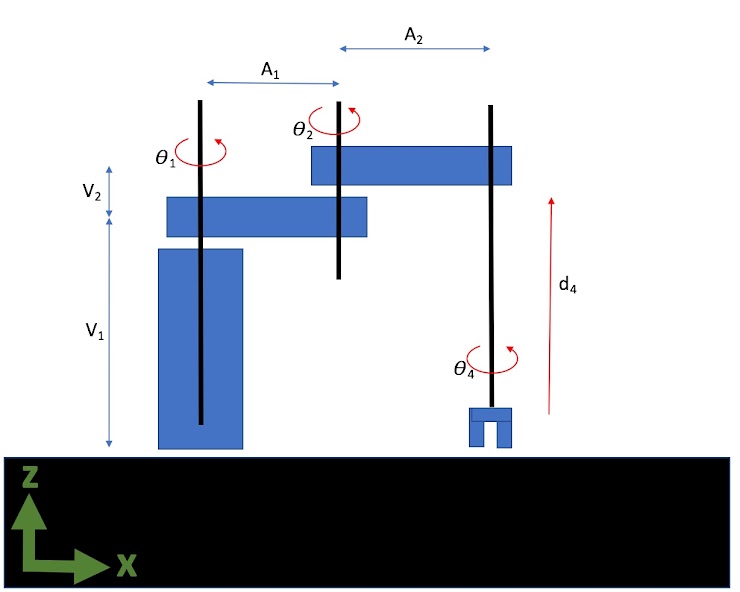
NOTE: The origin for this robot is located at the base of the first “tower” and is in-line with the first joint. The \(x\)-direction goes from the origin to the right and the \(z\)-axis goes from the origin upwards.
This is a little more tricky than the 2D case where everything was rotating around the axis that projects out of the \(x-y\) plane.
In 2D we only really worry about one axis of rotation.
However in 3D we can rotate around any line.
The following are the 3D transformation matrices that combine rotation around the x, y, or z axes with translations:
Rotation about the \(x\)-axis followed by a translation#
Rotation about the \(y\)-axis followed by a translation#
Rotation about the \(z\)-axis followed by a translation#
Rotation around an arbitrary axis in \(\mathbb R^3\)#
In fact, in \(\mathbb R^3\) we could rotate a body around an arbitrary line. Such a general rotation can we expressed as a composition of rotations and translations (product of matrices) we’ve already considered. See this link for details:
Question: Construct a joint transformation matrix called \(J_1\), which represents a coordinate system that is located at the top of the first “tower” (robot’s shoulder) and moves by rotating around the \(z\)-axis by \(\theta_1\) degrees. Represent your matrix using sympy and the provided symbols:
# Here are some libraries you may need to use
%matplotlib inline
import matplotlib.pylab as plt
import numpy as np
import sympy as sym
import math
sym.init_printing()
#Use the following symbols
q1,q2,d4,q4,v1,v2,a1,a2 = sym.symbols('\Theta_1, \Theta_2, d_4, \Theta_4, V_1, V_2,A_1,A_2', negative=False)
#put your answer here
q1
Question: Construct a joint transformation matrix called \(J_2\), which represents a coordinate system that is located at the “elbow” joint between the two rotating arms and rotates with the second arm around the \(z\)-axis by \(\theta_2\) degrees. Represent your matrix using sympy and the symbols provided above:
#put your answer here
Question: Construct a joint transformation matrix called \(J_3\), which represents a coordinate translation from the “elbow” joint all the way to the horizontal end of the robot arm above the wrist joint. Note: there is no rotation in this transformation. Represent your matrix using sympy and the symbols provided in question a:
#put your answer here
Question: Construct a joint transformation matrix called \(J_4\), which represents a coordinate system that is located at the tip of the robot’s “hand” and rotates around the \(z\)-axis by \(\theta_4\). This one is a little different, the configuration is such that the hand touches the table when \(d_4=0\) so the translation component for the matrix in the z axis is \(d_4-V_1-V_2\).
#put your answer here
Question: Rewrite the joint transformation matrices from questions a - d as numpy matrices with discrete (instead of symbolic) values. Plug in your transformations in the code below and use this to simulate the robot:
from ipywidgets import interact_manual
from mpl_toolkits.mplot3d import Axes3D
def Robot_Simulator(theta1=0,theta2=-0,d4=0,theta4=0):
#Convert from degrees to radians
q1 = theta1/180 * math.pi
q2 = theta2/180 * math.pi
q4 = theta4/180 * math.pi
#Define robot geomitry
V1 = 4
V2 = 0
A1 = 2
A2 = 2
#Define your transfomraiton matrices here.
J1 = np.matrix([[1, 0, 0, 0 ],
[0, 1, 0, 0 ],
[0, 0, 1, 0],
[0, 0, 0, 1]])
J2 = np.matrix([[1, 0, 0, 0 ],
[0, 1, 0, 0 ],
[0, 0, 1, 0],
[0, 0, 0, 1]])
J3 = np.matrix([[1, 0, 0, 0 ],
[0, 1, 0, 0 ],
[0, 0, 1, 0],
[0, 0, 0, 1]])
J4 = np.matrix([[1, 0, 0, 0 ],
[0, 1, 0, 0 ],
[0, 0, 1, 0],
[0, 0, 0, 1]])
#Make the rigid end effector
p = np.matrix([[-0.5,0,0, 1], [-0.5,0,0.5,1], [0.5,0,0.5, 1], [0.5,0,0,1],[0.5,0,0.5, 1], [0,0,0.5,1], [0,0,V1+V2,1]]).T
#Propogate and add joint points though the simulation
p = np.concatenate((J4*p, np.matrix([0,0,0,1]).T), axis=1 )
p = np.concatenate((J3*p, np.matrix([0,0,0,1]).T), axis=1 )
p = np.concatenate((J2*p, np.matrix([0,0,0,1]).T), axis=1 )
p = np.concatenate((J1*p, np.matrix([0,0,0,1]).T), axis=1 )
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
ax.scatter(p[0,:].tolist()[0],(p[1,:]).tolist()[0], (p[2,:]).tolist()[0], s=20, facecolors='blue', edgecolors='r')
ax.scatter(0,0,0, s=20, facecolors='r', edgecolors='r')
ax.plot(p[0,:].tolist()[0],(p[1,:]).tolist()[0], (p[2,:]).tolist()[0])
ax.set_xlim([-5,5])
ax.set_ylim([-5,5])
ax.set_zlim([0,6])
ax.set_xlabel('x-axis')
ax.set_ylabel('y-axis')
ax.set_zlabel('z-axis')
plt.show()
target = interact(Robot_Simulator, theta1=(-180,180), theta2=(-180,180), d4=(0,6), theta4=(-180,180)); ##TODO: Modify this line of code
✅ Question: Can we change the order of the transformation matrices? Why? You can try and see what happens.
Put your answer to the above question here.
3. Odd Clock#
Consider the clock depicted in the following image.

from: Hackaday
Instead of a standard clock–which has independent hour and minute hands–this clock connects the minute hand at the end of the hour hand. Here is a video showing the sped-up clock motion:
from IPython.display import YouTubeVideo
YouTubeVideo("bowLiSlm_gA",width=640,height=360, mute=1)
The following code is an animated traditional clock which uses the function as a trick to animate things in jupyter:
%matplotlib inline
import matplotlib.pylab as plt
from IPython.display import display, clear_output
import time
def show_animation(delay=0.01):
fig = plt.gcf();
time.sleep(delay) # Sleep for half a second to slow down the animation
clear_output(wait=True) # Clear output for dynamic display
display(fig) # Reset display
fig.clear() # Prevent overlapping and layered plots
Lets see a standard analog clock run at high speed
import numpy as np
'''
Analog clock plotter with time input as seconds
'''
def analog_clock(tm=0):
#Convert from time to radians
a_minutes = -tm/(60*60) * np.pi * 2
a_hours = -tm/(60*60*12) * np.pi * 2
#Define clock hand sizees
d_minutes = 4
d_hours = 3
arrow_width=0.5
arrow_length=1
# Set up figure
fig = plt.gcf()
ax = fig.gca();
ax.set_xlim([-15,15]);
ax.set_ylim([-10,10]);
ax.scatter(0,0, s=15000, color="navy"); #Background Circle
plt.axis('off');
# Calculation Minute hand transformation matrix
J2 = np.matrix([[np.cos(a_minutes), -np.sin(a_minutes)],
[np.sin(a_minutes), np.cos(a_minutes)]] )
pm = np.matrix([[0,d_minutes], [-arrow_width,d_minutes], [0,arrow_length+d_minutes], [arrow_width,d_minutes], [0,d_minutes]] ).T;
pm = np.concatenate((J2*pm, np.matrix([0,0]).T), axis=1 );
ax.plot(pm[0,:].tolist()[0],(pm[1,:]).tolist()[0], color='cyan', linewidth=2);
# Calculation Hour hand transformation matrix
J1 = np.matrix([[np.cos(a_hours), -np.sin(a_hours)],
[np.sin(a_hours), np.cos(a_hours)]] )
ph = np.matrix([[0,d_hours], [0,d_hours], [-arrow_width,d_hours], [0,arrow_length+d_hours], [arrow_width,d_hours], [0,d_hours]]).T;
ph = np.concatenate((J1*ph, np.matrix([0,0]).T), axis=1 );
ax.plot(ph[0,:].tolist()[0],(ph[1,:]).tolist()[0], color='yellow', linewidth=2);
#Run the clock for about 5 hours at 100 times speed so we can see the hands move
for tm in range(0,60*60*5, 100):
analog_clock(tm);
show_animation();
For the following few questions, consider the transformation matrix \(J_1\) redefined below with an angle of 5 hours out of 12.
import sympy as sym
import numpy as np
sym.init_printing(use_unicode=True)
a_hours = 5/12 * 2 * np.pi
J1 = np.matrix([[np.cos(a_hours), -np.sin(a_hours)],
[np.sin(a_hours), np.cos(a_hours)]] )
sym.Matrix(J1)
✅ Question: Using code, show that the transpose of \(J_1\) is also the inverse of \(J_1\), then explain how the code demonstrates the answer.
#Put your answer here
Explain your answer here.
✅ Question: Given the trigonometric identity \(\cos^2(\theta) + \sin^2(\theta) = 1\), prove by construction–using either Python or \(\LaTeX\)/Markdown or sympy (if you are feeling adventurous)–that the transpose of the \(J_1\) matrix is also the inverse for ANY angle a_hours \(\in [0, 2\pi]\).
Put your proof here.
Now consider the following code which attempts to connect the hands on the clock together to make the Odd Clock shown in the video above.
%matplotlib inline
import matplotlib.pylab as plt
from IPython.display import display, clear_output
import time
def show_animation(delay=0.01):
fig = plt.gcf();
time.sleep(delay) # Sleep for half a second to slow down the animation
clear_output(wait=True) # Clear output for dynamic display
display(fig) # Reset display
fig.clear() # Prevent overlapping and layered plots
import numpy as np
def odd_clock(tm=0):
#Convert from time to radians
#a_seconds = -tm/60 * np.pi * 2
a_minutes = -tm/(60*60) * np.pi * 2
a_hours = -tm/(60*60*12) * np.pi * 2
#Define robot geomitry
#d_seconds = 2.5
d_minutes = 2
d_hours = 1.5
arrow_width=0.5
arrow_length=1
# Set up figure
fig = plt.gcf()
ax = fig.gca();
ax.set_xlim([-15,15]);
ax.set_ylim([-10,10]);
plt.axis('off');
#Define the arrow at the end of the last hand
#p = np.matrix([[0,d_minutes,1], [0,0,1]]).T
p = np.matrix([[0,d_minutes,1], [-arrow_width,d_minutes,1], [0,arrow_length+d_minutes,1], [arrow_width,d_minutes,1 ], [0,d_minutes,1 ], [0,0,1]] ).T;
# Calculation Second hand transformation matrix
J2 = np.matrix([[np.cos(a_minutes), -np.sin(a_minutes), 0 ],
[np.sin(a_minutes), np.cos(a_minutes), d_hours ],
[0, 0, 1]])
p = np.concatenate((J2*p, np.matrix([0,0,1]).T), axis=1 )
J1 = np.matrix([[np.cos(a_hours), -np.sin(a_hours), 0 ],
[np.sin(a_hours), np.cos(a_hours), 0 ],
[0, 0, 1]])
p = np.concatenate((J1*p, np.matrix([0,0,1]).T), axis=1 )
ax.scatter(0,0, s=20, facecolors='r', edgecolors='r')
ax.plot(p[0,:].tolist()[0],(p[1,:]).tolist()[0])
#Run the clock for about 5 hours at 100 times speed so we can see the hands move
for tm in range(0,60*60*5, 100):
odd_clock(tm);
show_animation();
✅ Question: Using the given point (\(p\)) written in “minutes” coordinates (on line 26 of the above code) and the above transformation matrices (\(J_1,J_2\)), write down the equation to transform \(p\) into world coordinates \(p_w\).
Put the answer to the above question here
✅ Question: Notice the above odd_clock function has variables d_seconds and a_seconds commented out. Use these variables and modify the above code to add a “seconds” hand on the tip of the minute hand such that the seconds hand moves around the minute hand just like the minute hand moves around the hour hand. If you have trouble, use the following cell to explain your thought process and where you are getting stuck.
Written by Dr. Dirk Colbry, Michigan State University

This work is licensed under a Creative Commons Attribution-NonCommercial 4.0 International License.
###STARTFOOTER###